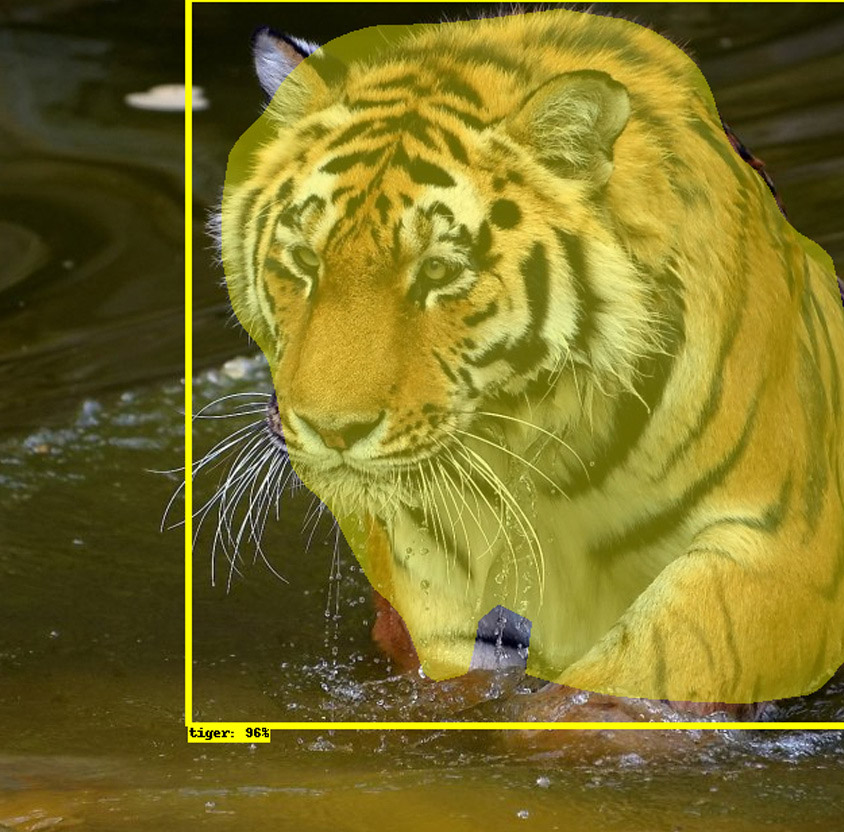
System for comparative analyses and calculating Siberian tiger populations
Project targets
The Job
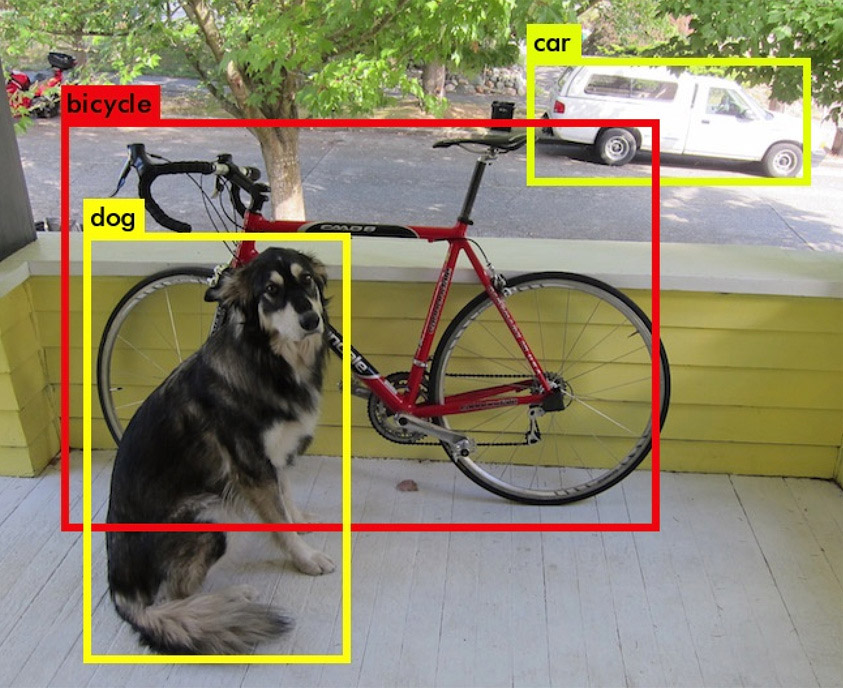
Object detection and facial comparison systems for the police
Project targets
The Job
Retinal recognition
Project targets

The Job
- segment the iris and highlight textures
- highlight singularities and create biometric patterns
- combine the patterns
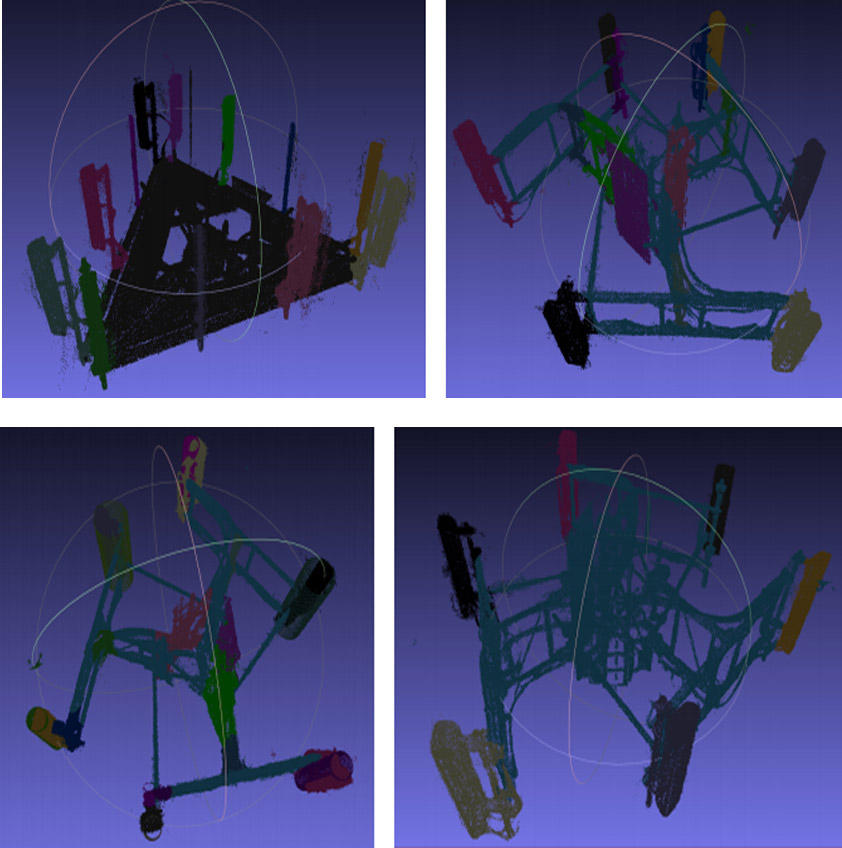
Segment objects on communication towers in a 3D cloud of points
Project targets